Individuals crave security, stability, continuity, and the option to create change. How? By retaining project progress. Your Continuity Product can make this happen. Your policy, concept, or idea is for the benefit of humanity, not just your lifetime. Even though Steve Jobs has passed away, your iPhone still blinks. A continuity mind frame is what lies behind successful enterprise. A continuity product is packaged in four parts: one, your team is indifferent to pressure; two, you are not in recovery mode, you take action; three, key resources are always ready; four, Big Data will manage your stats and your impacts.
The term ‘robot’ tends to conjure up images ofwell-known metal characters like C-3P0, R2-D2, and WALL-E. The robotics research boom has in the end enabled the introduction of real robots into our homes, workspaces, and recreational places. The pop culture icons we loved have now been replaced with the likes of robot vacuums such as the Roomba and home-automated systems for smoke detectors, or WIFI-enabled thermostats, such as the Nest. Nonetheless, building a fully autonomous mobile robot is still a momentous task. In order to purposefully travel around its environment, a mobile robot has to answer the questions ‘where am I?’, ‘where should I go next?’ and ‘how am I going to get there?’
Like humans, mobile robots must have some awareness of their surroundings in order to carry out tasks autonomously. A map comes in handy for humans. A robot could build the map itself while exploring an unknown environment—this is a process called Simultaneous Localisation and Mapping (SLAM). For the robot to decide which location to explore next, however, an exploration strategy would need to be devised, and the path planner would guide the robot to navigate to the next location, which increases the map’s size.
Rachael N. Darmanin
Rachael Darmanin (supervised by Dr Ing. Marvin Bugeja), used a software framework called Robot Operating System (ROS) to develop a robot system that can explore and map an unknown environment on its own. Darmanin used a differential-drive-wheeled mobile robot, dubbed PowerBot, equipped with a laser scanner (LIDAR) and wheel encoders. The algorithms responsible for localising the robot analyse the sensors’ data and construct the map. In her experiments, Darmanin implemented two different exploration strategies, the Nearest Frontier and the Next Best View, on the same system to map the Control Systems Engineering Laboratory. Each experiment ran for approximately two minutes until the robot finished its exploration and produced a map of its surroundings. This was then compared to a map of the environment to evaluate the robot’s mapping accuracy. The Next Best View approach generated the most accurate maps.
Mobile robots with autonomous exploration and mapping capabilities have massive relevance to society. They can aid hazardous exploration, like nuclear disasters, or access uncharted archaeological sites. They could also help in search and rescue operations where they would be used to navigate in disaster-stricken environments. For her doctorate, Darmanin is now looking into how multiple robots can work together to survey a large area—with a few other solutions in between.
This research was carried out as part of a Master of Science in Engineering, Faculty of Engineering, University of Malta. It was funded by the Master it! Scholarship Scheme (Malta). This scholarship is part-financed by the European Union European Social Fund (ESF) under Operational Programme II Cohesion Policy 2007–2013, Empowering People for More Jobs and a Better Quality Of Life.
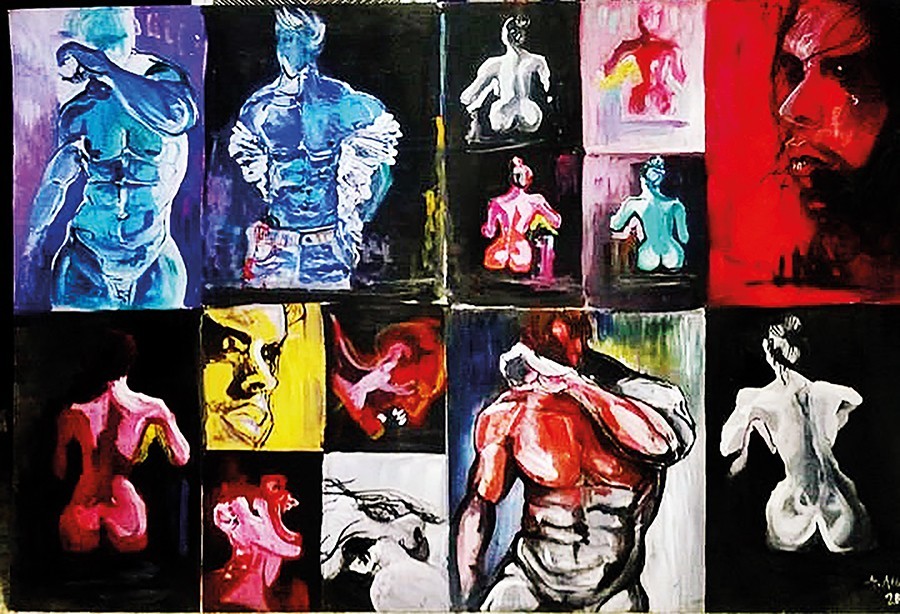
Prostitution no.2 by Abigail Attard Prostitution is known as the oldest profession. It is also the one with the highest human cost. This artwork reflects the pain female prostitutes feel contrasted by the coldness of the men who fuel the business. Attard was inspired by news items on these issues, and her belief that more measures are needed to bring an end to the business that fuels the objectification of women.
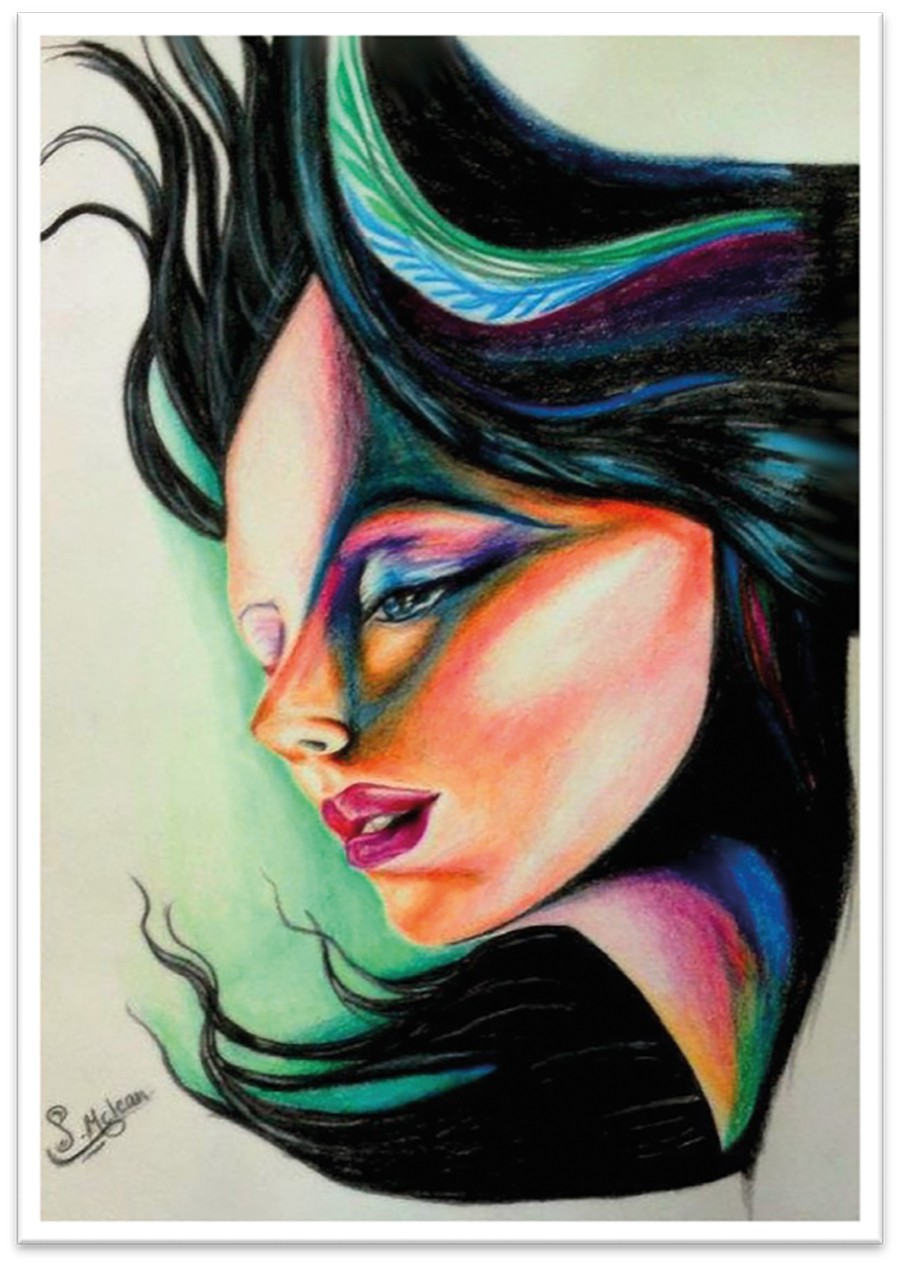
CuriouSedative by Sharon McLean Many idioms reflect how curiosity is not always a good thing. This artwork personifies the mental struggle suffered when a curious mind tries to seek tranquility. It also represents a person’s cautiousness sheltering the self from exposing their state of mind.
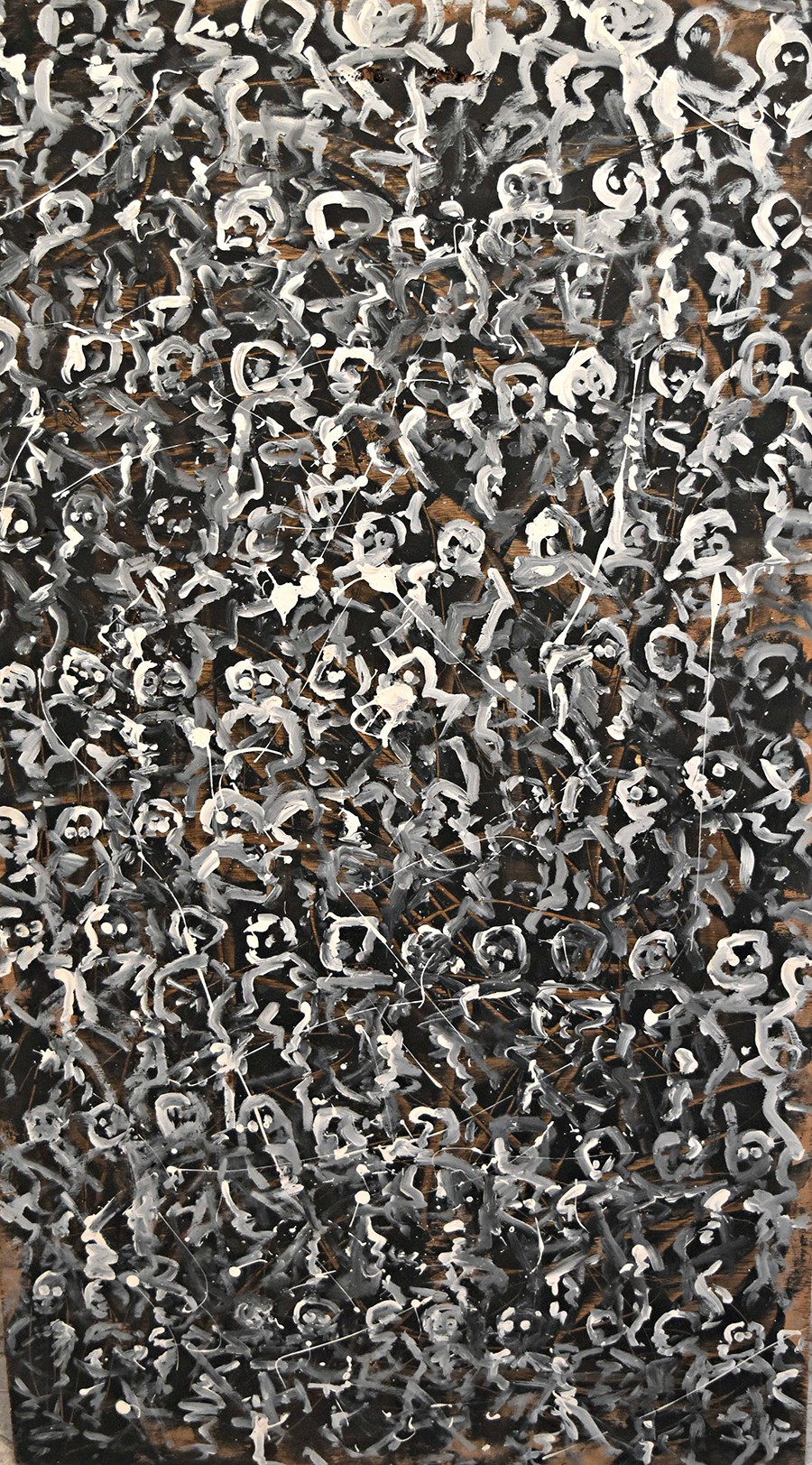
Untitled 1 by Lara Gove This artwork is part of a series interpreting a text known as Cities and the Dead 4 which is found in Italo Calvino’s book Invisible Cities. The painting reflects a state of decay, an entire city turned into a burial ground with confined spaces with restricted movement.
Wooden Sculpture no.1 by John Paul Muscat This artwork’s imagery reflects multiculturalism. It is the artist’s first wood carving.
Hollow by Cristina Formosa Cyberbullying can have dreadful repercussions. This art installation with figures made of transparent tape reflects the emptiness a person can feel when they are the victims of online harassment. The figures merged with their surroundings and became part of the space, with an almost ghost-like effect.
Theatre, dance, and music are changing at the University of Malta. Recently, three new research groups were launched by the School of Performing Arts (SPA) with the aim of bridging different disciplines throughthe development of shared work processes and research areas. Through interdisciplinary research, these groups want to look outwards towards new concepts.
The groups cover three themes. First, ‘Twenty-first-Century Studies in Performance’, which is committed to the locating, reimagining, and development of performance practices in the 21st century. Second, ‘Culture and Performance’, which is guided by the premise that culture and performance refer to complexities that emerge from the multitude of phenomena these terms describe. Third, ‘Performing Arts Histories and Historiographies’, which investigates and archives material related to historical events across the performing arts. These themes are possible thanks to a web of local and international collaborations, ranging from the Digital Arts and Humanities to Cognitive Science and Intelligent Computer Systems.
These new research platforms seek to facilitate dialogue between scholars and practitioners, academics and citizens.
Annual Collective Performance of the School of Performing Arts. White White is a performance about space, or the absence of it. Once upon a time, characters were in search of an author. Today they are in search of a space. The characters, played by the students of the School of Performing Arts at the University of Malta, are lost in a corridor in-between places. Around them all is empty. A void. Like a vault, all they have is White! Photo: Darrin Zammit LupiinFragments A devised performance created by the students of the School of Performing Arts, University of Malta MITP Photo by Darrin Zammit Lupi
SPA has an upcoming conference featuring some of the above topics called Interweaving Cultures: Theory and Practice in March 2017. For more information contact Dr Stefan Aquilina (stefan.aquilina@um.edu.mt) or, on the conference, Prof. Vicki Ann Cremona (vicki.cremona@um.edu.mt).
In his book This is Your Brain on Music, Daniel Levitin writes, ‘Whenever humans come together for any reason, music is there.’ From weddings and funerals, to graduation parties and men marching off to war, ‘music is and was [always] part of the fabric of everyday life.’
The start of a new scholastic year can bring about feelings of excitement to some and dread to others. After the relatively quiet summer months, children need to start making their way to school in the mornings. The result is traffic, an ugly monster that brings Malta to a standstill every morning. One solution could be the grouping of school trips to and from homes.
Kristina Mifsud (supervised by Ms Amanda Borg) decided to investigate the issue of traffic congestion caused by school transport by studying a hypothetical scenario in which the free school transport policy for government-run schools was extended to church and independent schools. First she conducted a survey: parents who have children at church and independent schools answered a questionnaire. These parents drove their children to school using their private vehicles. The results were very promising with more than 70% of mothers indicating that they would switch to the government-provided school transport if it was implemented. Those who said they would not take up the service gave three main reasons for this: mistrust of minivan drivers, their children being too young, and that the drive to school was a distraction-free time with their children.
Then Mifsud estimated the benefits and costs for the service using the take-up percentage from the questionnaire. The list of benefits was plentiful; time and fuel would be saved, while air pollution and environmental costs would be reduced. The costs included the initial investment (minivans), fuel, maintenance, and staff payment. When compared, the total estimated benefits far exceeded these costs! For every €1 invested by the government into this school transportation system, society would reap €2.66 in benefits. Additionally, the direct cost (time and fuel) of individual school runs per child per year amounts to €993.22, based on the average time taken per child of 48.8 minutes per school day. Given that the average fee by minivan drivers for a year worth of school runs is around €600, the minivan school transport option is much more sensible, economically speaking, and all the more so with regards to protecting our environment and solving the traffic headache.
This research was carried out as part of a Bachelor of Commerce in Economics at the Faculty of Economics, Management and Accountancy, University of Malta.