
Drones have rapidly gained popularity in recent years. They are now commonly used by photographers and videographers, law enforcement, the military, and criminologists. At the University of Malta (UM), they are being used as a part of CloudIsle.
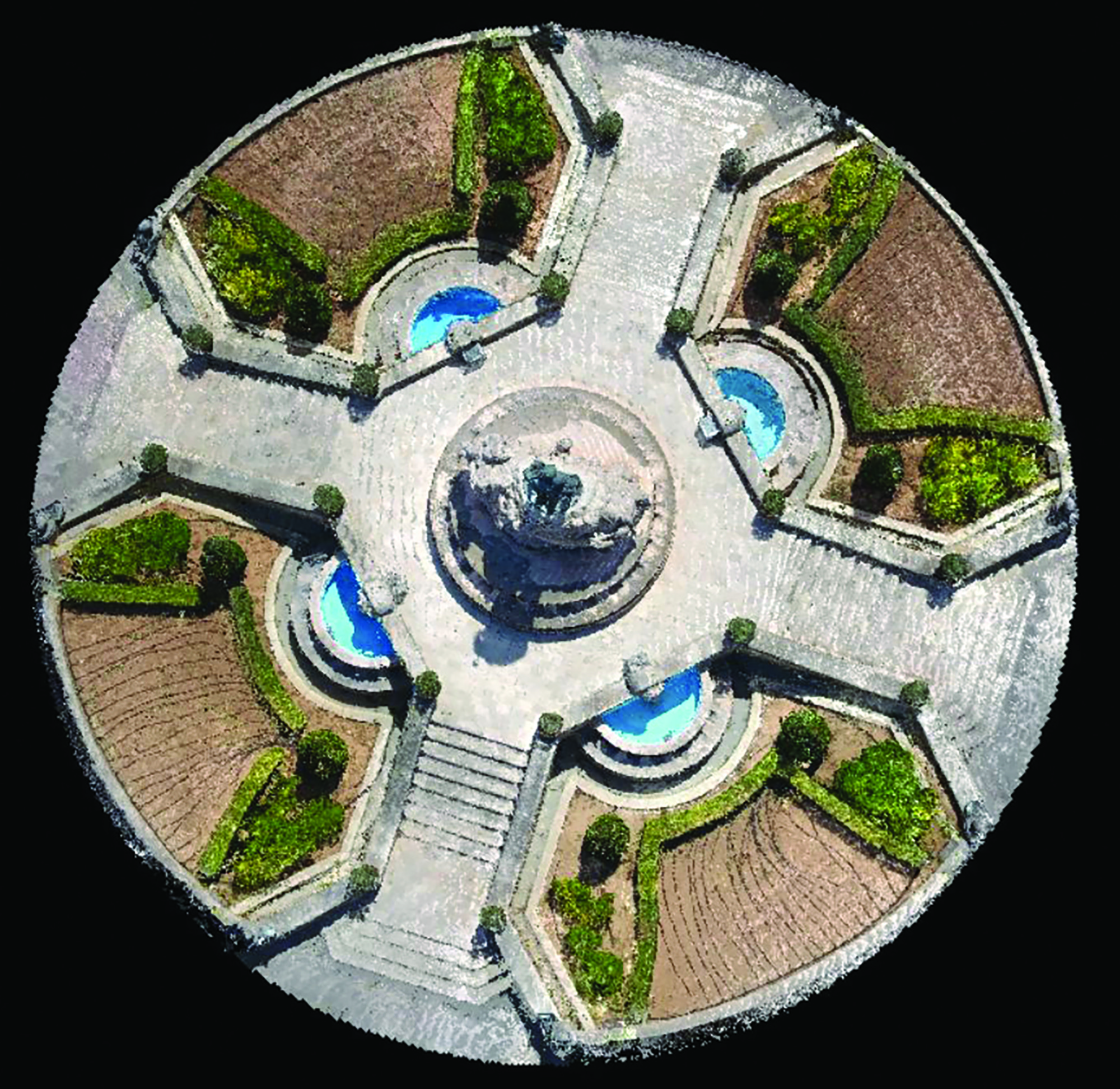
CloudIsle, a project headed by Prof. Saviour Formosa (Faculty for Social Wellbeing, UM), is using drones kitted out with laser scanning tools, ground-penetrating radar, and surveying equipment to create 3D maps of Malta. Using billions of data points, the fine details of above and below-ground features can be recorded. This includes precise detail on buildings, as well as the intricacies of the island’s labyrinth of underground caves. The technology will even be used to uncover underwater artefacts at up to 500m depth. The legendary Um El-Faroud and the Xlendi-Karwela-Cominoland trio of wrecks, now transformed into artificial reefs and popular diving sites, are currently under review.
This data’s real-world applications are vast. It can be used to aid Malta’s Planning Authority and ensure building stability, as well as analyse extreme weather and monitor climate change. The Department of Criminology (Faculty for Social Wellbeing, UM) is also employing these tools in environmental enforcement, as well as for spatial forensics and crime reconstruction in scenes related to bombings and homicides.

CloudIsle is already reaping rewards. The team has discovered and named the Għariebel doline land feature off the Selmunett Islands. They have also created a baseline map of Malta and its seas that can be used to integrate new 3D spatial data.



