Current hand prosthetics are expensive, heavy, and hard to control. Researchers from the University of Malta (UM), in collaboration with Orthopaedic Centre Malta, are addressing these problems by simplifying the design of prosthetic hands. The project MAProHand, led by Prof. Ing. Michael Saliba, creates a novel hand prosthetic that concentrates on the key functions of the hand.
Imagine you have an accident that cuts off your right hand. While hand prostheses might seem like an obvious solution, you quickly find signficant challenges. There are either aesthetic artificial hands that don’t do anything, or motorised hands that are highly expensive, very heavy, and counterintuitive to control. You ask yourself why there isn’t a motorised hand that is affordable, easy to control but nonetheless able to perform most of the tasks you need. The prosthetic hand you are looking for is what the UM project MAProHand – Minimal Anthropomorphic Prosthetic Hand – is developing.
Prof. Ing. Michael Saliba, professor in the UM’s Department of Mechanical Engineering, has been researching robotic hands for more than 20 years. Together with Prof. Ing. Kenneth Camilleri from the UM’s Department of Systems and Control Engineering, Saliba started the MAProHand project to apply his knowledge about artificial hands to the area of prosthetics. In this field, the researchers faced new challenges as a hand prosthesis needs to be small, lightweight, and easy to use. In 2017, the project team, led by Saliba as principal investigator, started to take on the challenge of improving the shortcomings of current hand prostheses.
Hand Prosthetics
If someone wants a hand prosthesis that can take over some of the tasks of human hands, they need to get a motorised hand. The design of such hands, based on natural human hands, usually has five fingers with two or three joints each. Many of the joints can be controlled independently from the others. As obvious as this design may seem at first glance, it has some major deficits. Every independent joint needs a motor on its own, so the more such joints there are in a prosthetic hand, the heavier the hand gets and the more costly it becomes. Moreover, the more joints that need to be controlled individually, the harder it gets for the user to coordinate movements and make the hand operate as intended. The solution to these problems is to determine the key functions a prosthesis needs to perform and streamline the design to achieve those.
No artificial hand is as sophisticated as a natural hand. As soon as someone loses their dominant hand, the other hand takes over the role, no matter what kind of prosthesis they use. Therefore, the task of a hand prosthesis should be to replace the non dominant hand, which doesn’t need to be as dexterous as the main hand.
Most of the movements we perform with our nondominant hand can be attributed to motion-patterns: reoccurring movements we perform with the entire hand. If the prosthesis is able to perform these motion-patterns as a whole, it doesn’t need to move every joint individually. One example of a motion-pattern is the movement of closing the hand. It is used most of the time when the hand grabs something. Depending on the size of the object, the same movement stops in a more open or more closed position. ‘By moving the entire hand instead of every joint individually, the prosthesis can be designed simpler than the ones that try to exactly replicate a human hand,’ Saliba points out. ‘The artificial hand loses some dexterity, but compensates by being easier to control.’ In a set of experiments, MAProHand determined motion-patterns, hand design, and prosthesis control.
MAProHand
The MAProHand project benefited from the participation of many researchers from different fields. Under the coordination of Saliba, all of them contributed their expertise to the common goal.
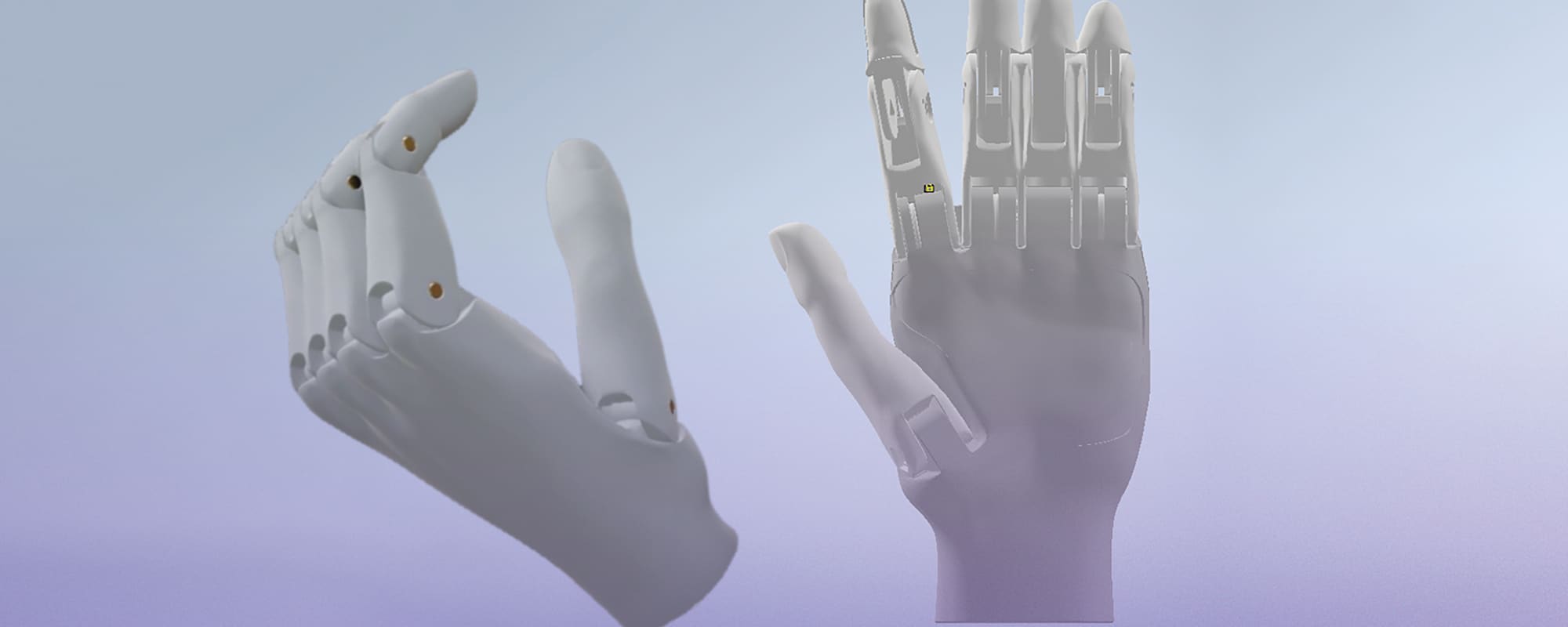
Yesina Aquilina, doctoral student at the Department of Mechanical Engineering, performed experiments on human subjects to investigate the required hand structure. She determined the minimum features a hand needs to perform most of the tasks a non-dominant hand usually does, and the specific motion-patterns that such a minimal hand would need. Together with Saliba, she confirmed that the ring finger and little finger are not essential for those tasks. Therefore, the resulting hand structure merged the two fingers with the middle finger to avoid unnecessary complexity. A hand designed this way is easier to control and needs fewer motors, thereby becoming lighter and cheaper.
Developing such a sophisticated hand required extensive simulations. For this part of the project, MAProHand was helped by Prof. Alexiei Dingli from the UM’s Department of Artificial Intelligence. Together, the researchers determined the best values for the various hand dimensions, as well as the best way to orient and couple the various joints.
The prosthesis’ movements are controlled by the muscles in the arm of the amputee. The muscles’ movements trigger electrical signals on the arm’s skin, which can be measured. Camilleri and master’s student Rachel Cauchi implemented an existing tool that does exactly that. Using this technology in the form of an armband with appropriate sensors, the researchers set up the system to control the hand. In an intact hand, every motion-pattern is triggered by movements in the arm that are individual to each pattern. When someone loses a hand, if their arm muscles remain intact, they can activate those muscles with electrical signals as if they still had a hand. The armband detects such activation signals and recognises which motion-pattern it is trying to induce. According to that information, the signals collected in the armband tell the prosthesis which gesture to make.
Translating the muscles’ electrical signals to hand movements is a tricky computational challenge. Measuring the signals and the corresponding hand movements of test subjects with limbs intact, the researchers collected data to train a neural network to recognise which electrical signals at the skin link to which hand gestures. They then confirmed experimentally that the same neural network can be used on persons missing their hand, either from birth or through amputation, to determine the motion that they wish to impart to the prosthetic hand in an intuitive manner.
After the hand design was completed, Engineering graduate and Orthopaedic Centre Malta researcher Christian Von Brockdorff helped complete the control system of the 3D-printed prototype and fit the motors. He also managed the prosthesis’ feedback system. Sensors located in the finger gear trains sense if the prosthesis touches something and how much strength the prosthetic hand applies. This information is fed back to the amputee via a vibration signal at the armband.
To keep the device close to amputees’ needs, the project benefited from their field consultant Dr Jesmond Attard, RSO with the Department of Mechanical Engineering. As a professional working closely with amputees, he was able to provide valuable information on the real-world applicability of the project.
Fitting all these parts together, the research team managed to design and build a hand prosthesis that masters the vast majority of the tasks it needs to do, is easy to control via arm muscle movements, and can be produced more cheaply on a large scale than more complicated prostheses.
The Future of MAProHand
Before the new prosthesis can be produced, some issues still need to be resolved. ‘For now, the applicability is limited to the laboratory because the prosthesis still needs a desktop computer for the data processing. Finally, the translation of the data collected in the arm band into hand movements will be done by an integrated chip. Developing that chip is part of the project’s next stage,’ Saliba explains.
Another aspect is the physical stability of the 3D-printed hand structure. The challenge here is to build a light design that is nonetheless resistant to everyday stress. Future research will focus on making the prosthesis even lighter and more durable.
Even with the work that still needs to be done, MAProHand has already demonstrated that the principle of a minimal anthropomorphic hand is one that holds several advantages over current prostheses: it is easier to control, cheaper, and lighter. Having shown this, the research team will go on improving their model until it can finally be used by amputees who wish their functional hand back.
The project MAProHand is funded by the Malta council for science and technology under fusion research and innovation programme with the Contract R&I 2017-028T



Comments are closed for this article!